智能为王,掘胜千里——三一远程智能掘进机

近10年来,随着煤炭工业的高速发展,机械化、自动化程度大幅提升,实现“机械化换人、自动化减人”的智能开采已成为我国煤炭开采技术的发展方向。 三一重装从2015年开始对远程智能控制相关技术进行研究和方案设计,通过不懈的钻研,将掘进机与惯性导航系统有效的结合,实现截割轨迹远程控制、定位截割和可视化等技术,于2019年正式推出了远程智能掘进机,并在多处矿井进行实地应用。 三一远程智能掘进机 掘
 易购AI小易生成
易购AI小易生成 近10年来,随着煤炭工业的高速发展,机械化、自动化程度大幅提升,实现“机械化换人、自动化减人”的智能开采已成为我国煤炭开采技术的发展方向。
三一重装从2015年开始对远程智能控制相关技术进行研究和方案设计,通过不懈的钻研,将掘进机与惯性导航系统有效的结合,实现截割轨迹远程控制、定位截割和可视化等技术,于2019年正式推出了远程智能掘进机,并在多处矿井进行实地应用。

三一远程智能掘进机
掘进机远程智能控制技术,以机载惯性导航系统为平台,搭建掘进机模型及算法,该技术主要由可视化技术、掘进机姿态惯性自动测量系统和一键式自动截割等技术构成。
·惯性导航系统
掘进机采用高精度的三轴惯性导航系统,航向精度可控制在0.1°,姿态精度可达到0.02°,实时监测掘进机的俯仰、翻滚、航向的偏移,为控制掘进机截割头运动轨迹提供了良好的支撑。
·定位截割技术
通过掘进机的连杆坐标系、掘进机与巷道位置坐标和巷道模型断面,实现运动轨迹控制和截割路径自动规划,完成一个循环自动定位截割。
·截割轨迹在线监测技术
有效的突破井下因粉尘大而无法远距离操作的难题,建立“截割轨迹为主,视频为辅”的全新工作模式。高适应性,内置多种巷道模型,可适应不同煤矿巷道条件。定位误差小,精准获取截割头在巷道空间的位置坐标,误差≤5mm。成型误差小,通过边界降速及边界限位,巷道成型误差≤150mm。
掘进机远程智能控制技术由可视化技术、掘进机姿态惯性自动测量系统和一键式自动截割等技术构成
·超视距控制
掘进机采用近距离无线WiFi传输和远距离光纤传输相结合的模式,视频信号延时≤5ms,控制动作信号延时≤400ms,通讯信号延时≤100ms,控制距离≥1000m。
·双目视觉技术
通过视频图像技术,捕获巷道内掘进机的激光坐标点。通过坐标点在两个摄像机上的成像差异,计算出坐标点的位置,从而实现掘进机自动定位。
·截割头自动伸缩技术
截割部在截割工作时,通过控制算法,使截割臂旋转的同时,截割头进行伸缩补偿,保证截割头截割的工作面是一个平面。

·电机预测性维护
对截割电机采用K-means聚类预测模式,通过获取截割电机的温度、电阻以及振动频率等运行数据,对其运行状态进行聚类预测。
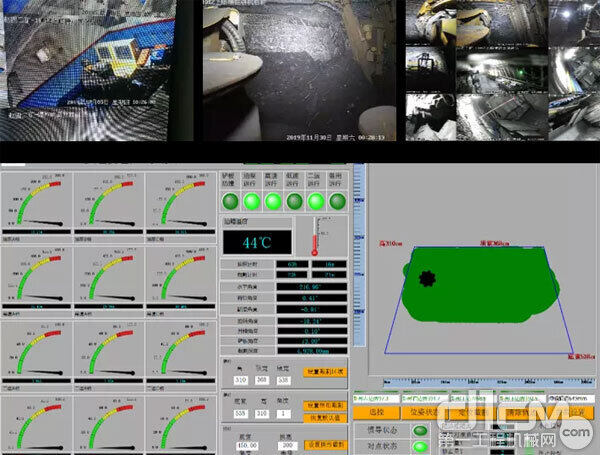
·平台系统
采用惯性导航系统基于虚拟现实技术,实现掘进机与巷道空间位置的3D可视化呈现;系统界面包括一键启动、自动截割、实时数据显示、参数设置以及故障报警等功能,部署指令更加便捷高效。

目前,三一重装研发团队在现有的基础之上,不断去通过调直技术、自适应截割等控制算法的优化,来提升掘进机智能化控制的应用水平,打造智慧生产的新模式,从而实现工作面的少人化与无人化。
(本文来自:三一重装)












期待你的精彩评论