地下连续墙抓斗自动扶正系统

目前,采用双卷扬结构形式的地下连续墙液压抓斗,以其钢丝绳磨损消耗低、抓斗体提升下放速度快、高稳定性等特点,受到越来越多制造商的青睐。但是双卷扬形式也有一些不足之处,抓斗体容易产生偏斜就是其中之一。 1.抓斗体偏斜的原因 双卷扬形式的地下连续墙抓斗成槽作业时,在很多地层条件下(特别是硬地层),需要快速下放抓斗体冲击槽底,以提高施工效率。 但快速下放,将使操作手无法及时将卷扬停住,抓斗体放到槽底时钢丝
 易购AI小易生成
易购AI小易生成 目前,采用双卷扬结构形式的地下连续墙液压抓斗,以其钢丝绳磨损消耗低、抓斗体提升下放速度快、高稳定性等特点,受到越来越多制造商的青睐。但是双卷扬形式也有一些不足之处,抓斗体容易产生偏斜就是其中之一。
1.抓斗体偏斜的原因
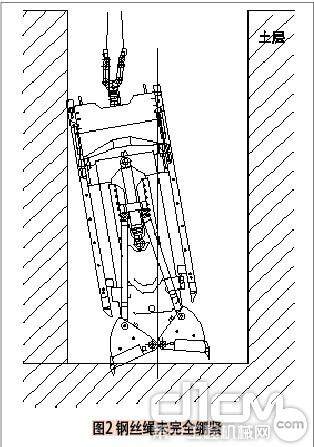
双卷扬形式的地下连续墙抓斗成槽作业时,在很多地层条件下(特别是硬地层),需要快速下放抓斗体冲击槽底,以提高施工效率。 但快速下放,将使操作手无法及时将卷扬停住,抓斗体放到槽底时钢丝绳处于松动状态,从而造成抓斗体产生偏斜。如图1所示。

为达到成槽标准,要求抓斗体作业时保持垂直。显然图1所示的工况就不能继续成槽。要想继续作业,就必须将抓斗体摆正。此时操作手须操作卷扬提升钢丝绳,使钢丝绳绷紧、抓斗体摆正。因操作手无法判断何时抓斗体已摆正,常出现钢丝绳似乎已经绷紧(一根钢丝绳已绷紧,一根未完全绷紧),但实际抓斗体仍然偏斜的状况。如图2所示。
对于这种情况,目前的解决办法有二:一是操作手根据质量传感器传出的质量显示,间接模糊地判断抓斗体偏斜状态;二是操作手根据抓斗体上的垂直度传感器(有的未配置)监测抓斗体垂直度,将抓斗体提升至垂直状态。
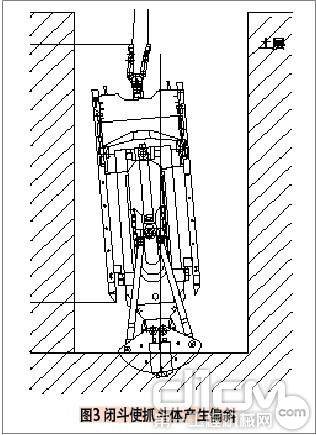
抓斗体靠其自升质量对下方土层产生压力,下方土层在斗扇向下闭合时,会给抓斗体一个反作用力,将抓斗体向上顶起。即使抓斗体已经摆正,在闭斗过程中抓斗体整体上升,仍会造成抓斗体偏斜。如图3所示。
作业时要求抓斗体一直垂直,但在闭斗整个过程中,抓斗体一直在上升,钢丝绳确会持续松动。对于这种情况,目前的解决办法是操作手本着宁多勿少的原则,根据垂直度和质量传感器的显示提升抓斗体。但这样就会减小抓斗体的入土深度,影响工作效率。
对于图1所示的工况,人为操作解决比较快捷。对于图2、图3所示的工况,如果未配置垂直度传感器,就只能以质量传感器(标准配置)的显示来模糊判断抓斗体的垂直情况,进行模糊操作。而配置垂直度传感器,操作手则需一边观看垂直度显示一边提升抓斗体,由此导致操作效率较低。
2.自动扶正系统原理
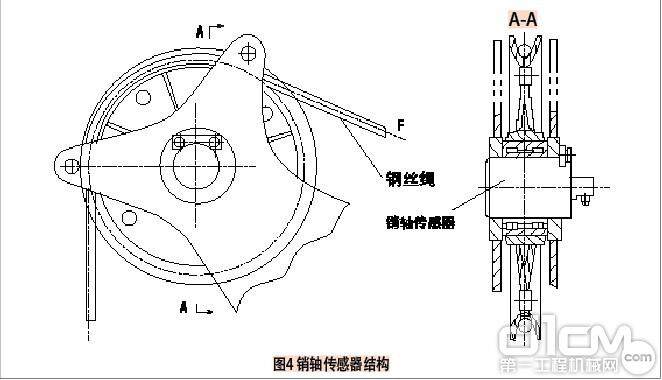
自动扶正系统由PLC控制器、HMI显示器、电控卷扬马达和2个高精度拉力传感器等组成。2个高精度拉力传感器分别安装在顶部滑轮销轴的内部,与销轴构成组件,我们称之为销轴传感器,如图4所示。2个销轴传感器分别测量2根钢丝绳上的拉力,所测得的拉力分别为T1、T2,再将数据传输至PLC控制器。
2根钢丝绳总拉力T计算公式:
T = T1+ T2
2根钢丝绳拉力差值ΔT计算公式:
ΔT = I T1-T2 I
拉力T和拉力差ΔT 在PLC内进行运算,若T<X,则PLC输出卷扬上提电信号,直至T>X;若ΔT >Y,则PLC输出卷扬上提信号,直至ΔT<Y。 其中X、Y为变量,其值随抓斗体不同、工况不同而有所差别,可以在HMI显示器内调整。
PLC输出的卷扬上升电信号传输至电控卷扬马达后,抓斗体开始上提。整个控制过程如图5所示:
对于图1所示工况,T值肯定很小。对于图2、图3所示工况,T值不一定很小,但由于两卷扬受力不均衡,ΔT值会较大。当T>X或ΔT>Y时,PLC将输出卷扬上升信号。 根据工况,将X、Y设定至一个合适值,即在以上3种工况下可实现抓斗体的自动上提,从而将抓斗体扶正。此系统在手动操作卷扬上升、下降时,自动控制不起作用,即手动操作优先。
从以上分析可以看出,在作业过程中应用自动扶正系统,可实现抓斗体的自动扶正,避免了人为模糊操作,提高了工作效率。
本文为《工程机械与维修》杂志独家向第一工程机械网供稿,转载请注明来源!












期待你的精彩评论