轮式摊铺机前轮电控辅助驱动改进方案(图)
轮式摊铺机前轮辅助驱动依靠安装在左、右后轮上的压力传感器控制电液比例溢流阀,从而改变恒压变量泵输出压力,使得前轮辅助驱动马达的扭矩发生变化。由于施工过程路况复杂,后轮负载变化频繁,与地面的摩擦系数也在不断变化,经常引起后轮打滑。一旦后轮打滑,压力传感器发出的信号就变小或没有,前轮也就不能辅助驱动,从而失去了前轮应当承担的辅助驱动作用,造成摊铺机带载工作能力下降。本文就改进前轮辅助驱动,防止后轮打滑
 易购AI小易生成
易购AI小易生成 轮式摊铺机前轮辅助驱动依靠安装在左、右后轮上的压力传感器控制电液比例溢流阀,从而改变恒压变量泵输出压力,使得前轮辅助驱动马达的扭矩发生变化。由于施工过程路况复杂,后轮负载变化频繁,与地面的摩擦系数也在不断变化,经常引起后轮打滑。一旦后轮打滑,压力传感器发出的信号就变小或没有,前轮也就不能辅助驱动,从而失去了前轮应当承担的辅助驱动作用,造成摊铺机带载工作能力下降。本文就改进前轮辅助驱动,防止后轮打滑,使整机驱动性能平稳可靠的电控方案进行解读。
1.前轮辅助驱动电控原理
前轮辅助驱动的电控部分由速度传感器、转向传感器与压力传感器、控制器构成,通过程序自动控制前轮驱动。其原理如图1所示。

前驱动轮电控原理
2.前轮辅助驱动的控制
前轮辅助驱动(控制流程见图2)通过速度传感器、转向传感器和压力传感器,实时采集摊铺机工作的行驶速度信号、转向角度信号和负载压力信号,并传送给控制器;转动行驶速度给定电位器旋钮进行工作行驶,控制器根据此时的工作行驶速度信号,对照工作行驶速度与前轮驱动恒压变量泵脉宽值的曲线关系(见图3),得到预输出脉宽值X1;控制器根据左、右工作速度及转向角度信号判断后轮打滑后,给出前轮驱动预输出脉宽值X2;控制器根据负载压力信号判断负载加大后,给出前轮驱动预输出脉宽值X3;控制器对X1、X2、X3进行比较,取最大脉宽值作为前轮驱动的最终脉宽值,输出给电液比例溢流阀,进而改变恒压变量泵的输出压力,使前轮驱动马达扭矩随之发生变化。

前轮辅助驱动控制流程

工作行驶速度与前轮驱动变量泵脉宽值曲线关系#d1cm#page#
3.前轮驱动预输出脉宽值
(1)绘制行驶速度与脉宽值曲线
测试前应将摊铺机停在较平坦的路面上,把发动机转速升到额定转速,并将熨平板挂好,准备在工作挡行驶。
获得前轮驱动变量泵起步最小脉宽值:将行驶速度给定电位器转动到零,推操作手柄向前,多次给定前轮驱动变量泵脉宽值,观察前轮,直到前轮刚开始打滑,此时所给的脉宽值为前轮驱动变量泵起步最小脉宽值X1a ;
获得各挡位前轮驱动变量泵的脉宽值:转动行驶速度给定电位器旋钮,在0~Nmax m/min(工作挡最大速度)选取若干整数速度点Nx,推动行驶手柄向前,当速度达到给定速度时,分别给出前轮驱动脉宽值Xn,观察前轮刚开始打滑时的脉宽值,即为此时行走速度Nx所对应的前轮驱动变量泵脉宽值Xn。
绘制工作行驶速度与前轮驱动变量泵脉宽值曲线时,以行驶速度Nx为横坐标,以前轮驱动变量泵脉宽值Xn为纵坐标,将各速度点所对应的前轮驱动变量泵脉宽值在坐标上标示,然后绘制多折线的曲线(保证各点在折线上或尽量靠近折线),并分别找出各折线2端点所对应的速度(NX-1、 NX-2)及脉宽值(Xn-1、 Xn-2)。根据公式 ⑴ 和 ⑵ 计算得出A、B,则工作行驶速度与前轮驱动变量泵脉宽值曲线关系示意图为多折线(见图3),各折线上前轮驱动脉宽值与速度的关系为Xn=A×NX+B,计算所得为前轮驱动预输出脉宽值X1。
Xn-1=A×NX-1+B ………… ⑴
Xn-2=A×NX-2+B ………… ⑵
(2)转向时前轮驱动预输出脉宽值的判定
转向时左、右半径计算方法如图4所示,从左、右行驶速度及转向角度即可判断后轮打滑给前轮驱动预输出脉宽值。
转向时左、右后轮转向半径比值获得方法:转向时,根据转向角度、前后轮距离和左、右后轮距离,计算得出左、右转向半径R左和R右;向左转,转向半径比K1=R1左/R1右,向右转,转向半径比K2=R2左/R2右;
根据左、右行驶速度及转向角度判断后轮是否打滑:左、右速度比M=N左/N右。向左转时,当F×K1﹤M﹤E×K1则判定后轮打滑;向右转时,当 F×K2﹤M﹤E×K2,则判定后轮打滑。其中E﹥1,F﹤1,由实测决定,以机器平稳工作为前提,可取E=1.1,F=0.9。当一边速度为零,另一边行走,则认为打滑。
若判定后轮打滑,则给出前轮预输出脉宽值X2=前轮驱动变量泵最大脉宽值,否则,X2=X1a 。
(3)负载加大时前轮驱动预输出脉宽值的判定
根据左、右后轮负载压力信号,判断负载加大时给出的前轮驱动预输出脉宽值方法如下:
左、右后轮分别有高、低压压力开关,当任一边高压压力开关给信号,则前轮预输出脉宽值X3=前轮驱动变量泵最大脉宽值;当两个低压压力开关均没信号, 则X3=X1a ;
低压压力开关信号主要用作控制脉宽值增加的速度,若装配模拟量压力传感器,则脉宽值随压力变化线性增减。
按上述计算,将预输出脉宽值X1、X2、X3比较,取最大值作为前轮脉宽值。控制器在△T时间内,比较现在脉宽值与前次扫描的脉宽值的变化,进行插补计算,使得输出的脉宽值成阶梯式的增加或减小,以保证前轮驱动的平稳。
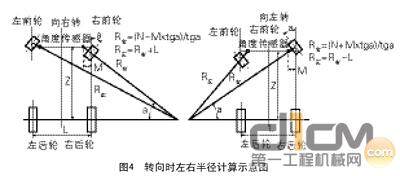
转向时左右半径计算示意图
脉宽值通过控制器输出给前轮驱动电液比例溢流阀线圈,由于脉宽值与电液比例溢流阀线圈上的电压值成线性关系,电压值变化将引起电液比例溢流阀线圈上电流值变化,改变恒压变量泵的排量,进而改变恒压变量泵的输出压力,从而自动控制前轮驱动马达扭矩的变化。
利用轮式摊铺机的行驶速度给出不同的预驱动力,同时当后轮打滑时增大前轮驱动力,并根据负载情况及工况自动控制前轮驱动力,增强了摊铺机的带载工作能力,减少了后轮打滑的可能,使整机驱动性能平稳可靠。(作者地址:湖南省长沙市经济技术开发区三一工业城 三一重工股份有限公司路面机械研究院液控所 410100)














期待你的精彩评论